

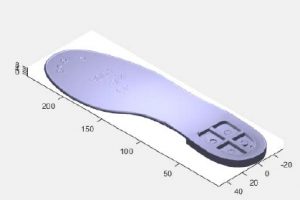
 Student Lucas Zaragoza from Clermont-Ferrand visited Zaragoza during 2019 in the frame of the Erasmus+ program. He worked on shape-matching methods used within the COMMANDIA project for the handling of deformable objects such as soles. In particular, he focused on the application of the Position-Based Dynamics method to simulate the deformation of the sole of a shoe.
Student Lucas Zaragoza from Clermont-Ferrand visited Zaragoza during 2019 in the frame of the Erasmus+ program. He worked on shape-matching methods used within the COMMANDIA project for the handling of deformable objects such as soles. In particular, he focused on the application of the Position-Based Dynamics method to simulate the deformation of the sole of a shoe.
COMMANDIA Tutorial on ROS
The Robot Operating System (ROS) is a set of software libraries and tools that help you build robot applications. And it’s all open source. This is the platform chosen for developing COMMANDIA Project. On June 25, 2019 a tutorial on ROS was successfully held on SIGMA Clermont with simultaneous streaming to University of Coimbra, University of Zaragoza, INESCOP and University of Alicante.


The tutorial at Zaragoza.
I3A Young Researchers Conference
We presented three different works of COMMANDIA in the “Jornada de Jóvenes Investigadores del I3A”, which were held on June 6 2019 in Zaragoza, Spain:
- R. Herguedas, G. López-Nicolás, C. Sagüés. Minimal multi-camera system for perception of deformable shapes. (Link)
- J. Martínez-Cesteros, G. López-Nicolás. Automatic image dataset generation for footwear detection. (Link)
- E. Hernández-Murillo, R. Aragüés, G. López-Nicolás. Volumetric object reconstruction in multi-camera scenarios. (Link)
The journal “Jornada de Jóvenes Investigadores del I3A” (ISSN:2341-4790) collects the proceedings of the conferences that are held annually since 2012 at the Instituto Universitario de Investigación en Ingeniería de Aragón (I3A), belonging to the University of Zaragoza. These conferences are the meeting point for researchers starting their research career at the I3A.
Mobile manipulator at COMMANDIA
 Let us introduce our mobile robotic platform Campero. This is a mobile manipulator prototype developed in the framework of project COMMANDIA. The main goal is the definition, design and implementation of integrated functionalities in robotic platforms that extend the capabilities of robotic systems for the manipulation of deformable objects in the context of industrial production. With this platform, we will provide a laboratory prototype of a multi-sensorial multi-robot with manipulation and ground locomotion capabilities, increasing precision in complex autonomous manipulation tasks of deformable objects.
Let us introduce our mobile robotic platform Campero. This is a mobile manipulator prototype developed in the framework of project COMMANDIA. The main goal is the definition, design and implementation of integrated functionalities in robotic platforms that extend the capabilities of robotic systems for the manipulation of deformable objects in the context of industrial production. With this platform, we will provide a laboratory prototype of a multi-sensorial multi-robot with manipulation and ground locomotion capabilities, increasing precision in complex autonomous manipulation tasks of deformable objects.
IEEE International Conference on Robotics and Automation 2019
Miguel Aranda presented at ICRA2019 the work entitled “Deformation-Based Shape Control with a Multirobot System”, which was coauthored by Juan Antonio Corrales and Youcef Mezouar. The conference was held on May 20-24, 2019 Montreal, Canada.

Abstract: We present a novel method to control the relative positions of the members of a robotic team. The application scenario we consider is the cooperative manipulation of a deformable object in 2D space. A typical goal in this kind of scenario is to minimize the deformation of the object with respect to a desired state. Our contribution, then, is to use a global measure of deformation directly in the feedback loop. In particular, the robot motions are based on the descent along the gradient of a metric that expresses the difference between the team’s current configuration and its desired shape. Crucially, the resulting multirobot controller has a simple expression and is inexpensive to compute, and the approach lends itself to analysis of both the transient and asymptotic dynamics of the system. This analysis reveals a number of properties that are interesting for a manipulation task: fundamental geometric parameters of the team (size, orientation, centroid, and distances between robots) can be suitably steered or bounded. We describe different policies within the proposed deformation-based control framework that produce useful team behaviors. We illustrate the methodology with computer simulations.
Meeting at Coimbra
Meeting of the COMMANDIA consortium at University of Coimbra on April 5, 2019.


COMMANDIA Newsletter – March 2019

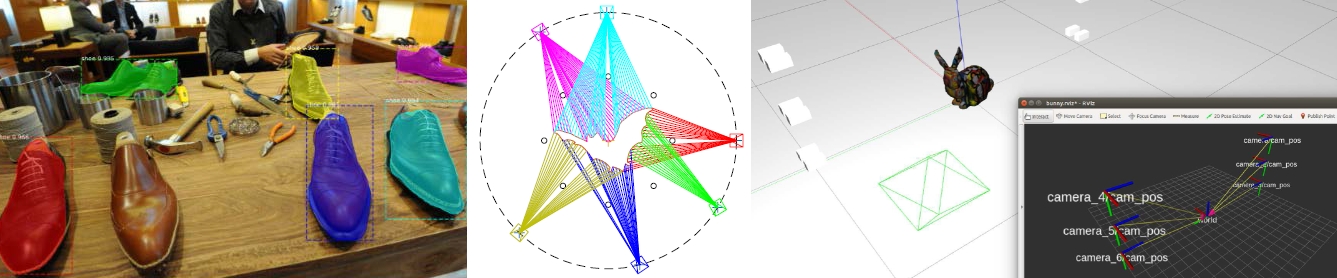
Some pictures illustrating the technological basis of our approach in the COMMANDIA project:
6ème journée mobilité innovante – Robotique coopérative pour la transitique : convoyage, transfert, manipulation
LabEx IMobS3, the ViaMéca competitiveness cluster, the I-SITE CAP 20-25 and the regional cluster Coboteam proposed this year to devote their event to innovative robotics solutions for workflow.
Among users, productive environments are particularly targeted: industry (manufacturing, food, pharmaceuticals…) and also agriculture, construction, mining and construction… Logistics, order preparation, distribution, etc. are also concerned, as are more specific intra-logistics (hospitals, services, etc.). Users will report successful deployments and integrations and their feedback will motivate new initiatives. The technological (unlocking, innovation), economic (return on investment, Robotics As A Service…), or human (acceptance, change management…) aspects can be addressed. Solution and technology providers, design offices, engineers and integrators, laboratories, will showcase their innovative know-how with regard to the state of the art.

Date: February 7, 2019
Location: Cézeaux Campus, Clermont- Ferrand, France.
Project COMMANDIA in European Cooperation Day
On 21 September 2018, The municipality of Alicante organised an event for citizens and local actors to show what “European territorial cooperation” really means. In order to do so, Interreg funds were presented along with real European projects promoting cooperation in different fields. José Francisco Gómez (INESCOP) presented project COMMANDIA during the event. The European Cooperation Day is celebrated all over Europe and beyond on 21 September every year, promoting achievements of cooperation among regions.
