Student degree project at UNIZAR on December 2020 in the framework of COMMANDIA:
“Autonomous navigation of mobile manipulator robot with camera and laser in the ROS environment” by David Barrera.



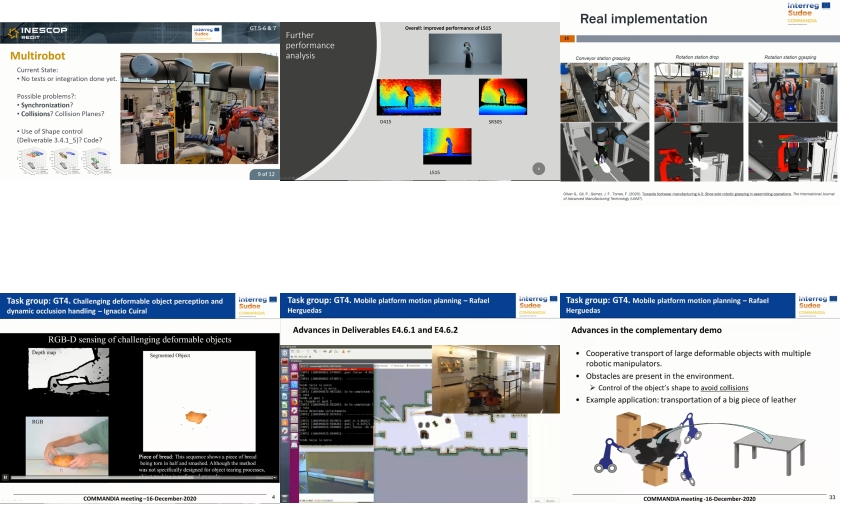
In this work we have used the environment ROS (Robot Operating System) to develop the autonomous navigation of a mobile manipulator robot. The navigation has been carried out in simulation and in real environments. The mobile platform is a robot known as robot Campero, that it is a prototype of the commercial robot RB-EKEN (Robotnik). The sensors used for the navigation are laser and vision. We have developed several programs for different types of navigation and the experiment results have been analyzed.