

Title: Simultaneous shape control and transport with multiple robots
Author: G. López-Nicolás, R. Herguedas, M. Aranda, Y. Mezouar.
Journal: IEEE International Conference on Robotic Computing (IRC), pp. 218-225, 2020.
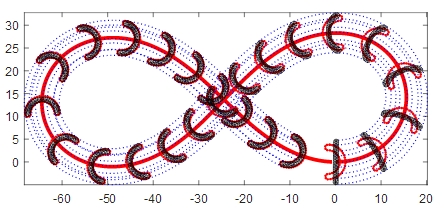
Abstract: Autonomous transport of objects may require multiple robots when the object is large or heavy. Besides, in the case of deformable objects, a set of robots may also be needed to maintain or adapt the shape of the object to the task requirements. The task we address consists in transporting an object, represented as a two dimensional shape or contour, along a desired path. Simultaneously, the team of robots grasping the object is controlled to the desired contour points configuration. Since the mobile robots of the team obey nonholonomic motion constraints, admissible trajectories are designed to keep the integrity of the object while following the prescribed path. Additionally, the simultaneous control of the object’s shape is smoothly performed to respect the admissible deformation of the object. The main contribution lies in the definition of the grasping robots’ trajectories dealing with the involved constraints. Different simulations, where the deformable object dynamics are modelled with consensus-based techniques, illustrate the performance of the approach.