

Title: Collision-free Transport of 2D Deformable Objects
Authors: Rafael Herguedas, Gonzalo Lopez-Nicolas, Carlos Sagues
Conference: International Conference on Control, Automation, and Systems (ICCAS 2021), Jeju, Korea, October 12-15, 2021
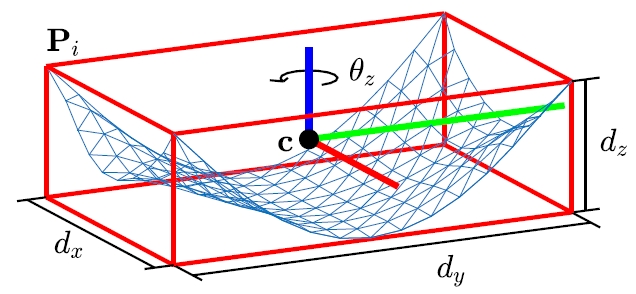
Abstract: We propose a novel system to transport 2D cloth-like deformable objects with mobile manipulators and without collisions along a known path. First, a new deformation model that allows for real-time shape prediction, based on the paradigm of deformable bounding box, is presented. The transport task is next defined as an optimization problem, which includes a set of linear and nonlinear constraints. These constraints allow to limit the object’s deformations and rotations and to avoid obstacles, respectively. Simulation results are reported to demonstrate the validity of our method.