

Title: RGB-D Sensing of Challenging Deformable Objects
Authors: Ignacio Cuiral-Zueco and Gonzalo Lopez-Nicolas
Workshop: Workshop on Managing deformation: A step towards higher robot autonomy (MaDef), 25 October – 25 December, 2020
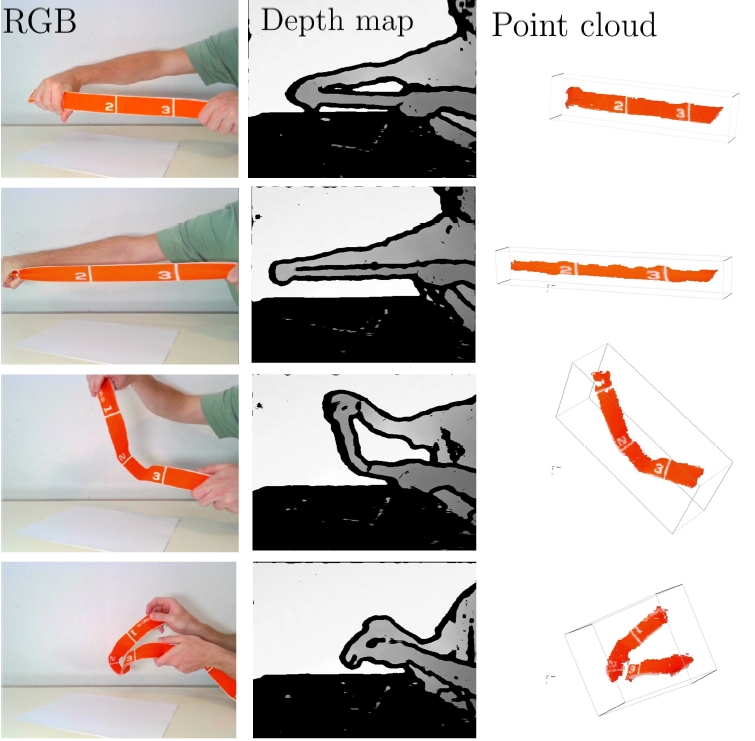
Abstract: The problem of deformable object tracking is prominent in recent robot shape-manipulation research. Additionally, texture-less objects that undergo large deformations and movements lead to difficult scenarios. Three RGB-D sequences of different challenging scenarios are processed in order to evaluate the robustness and versatility of a deformable object tracking method. Everyday objects of different complex characteristics are manipulated and tracked. The tracking system, pushed out the comfort zone, performs satisfactorily.