

Title: Robotic workcell for sole grasping in footwear manufacturing
Author: Guillermo Oliver, Pablo Gil, Fernando Torres
Conference: 25th Int. Conf. on Emerging Technologies and Factory Automation (ETFA), Vienna (Austria), 8-11 September 2020.
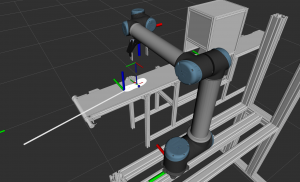
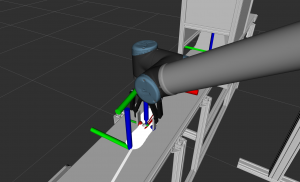
Abstract: The goal of this paper is to present a robotic workcell to automate several tasks of the cementing process in footwear manufacturing. Our cell’s main applications are sole digitization of a wide variety of footwear, glue dispensing and sole grasping from conveyor belts. This cell is made up of a manipulator arm endowed with a gripper, a conveyor belt and a 3D scanner. We have integrated all the elements into a ROS simulation environment facilitating control and communication among them, also providing flexibility to support future extensions. We propose a novel method to grasp soles of different shape, size and material, exploiting the particular characteristics of these objects. Our method relies on object contour extraction using concave hulls. We evaluate it on point clouds of 16 digitized real soles in three different scenarios: concave hull, k-NNs extension and PCA correction. While we have tested this workcell in a simulated environment, the presented system’s performance is scheduled to be tested on a real setup at INESCOP facilities in the upcoming months.