

Different students have presented their final master projects in the framework of COMMANDIA:
“Visual SLAM systems for robotic manipulator control in non-rigid environments” by Ignacio Cuiral.
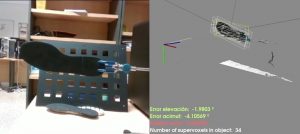 This work covers the process of investigation and study of a visual perception technique that allows the acquisition of useful information from the deformable objects in a scene to facilitate their manipulation with the use of robots.
This work covers the process of investigation and study of a visual perception technique that allows the acquisition of useful information from the deformable objects in a scene to facilitate their manipulation with the use of robots.
“Multi-camera systems for volumetric reconstruction of 3D objects” by Enrique Hernández.
 This work focuses on the study and subsequent implementation of a distributed algorithm for the perception of deformable objects, as well as the development of the appropriate software architecture for its implementation. This algorithm is within the field of cooperative control of multi-agent systems. Within this framework, the volumetric reconstruction of objects is essential in robotic manipulation. Building the 3D model of an object is a complex problem that involves aspects such as modeling, control, perception or planning.
This work focuses on the study and subsequent implementation of a distributed algorithm for the perception of deformable objects, as well as the development of the appropriate software architecture for its implementation. This algorithm is within the field of cooperative control of multi-agent systems. Within this framework, the volumetric reconstruction of objects is essential in robotic manipulation. Building the 3D model of an object is a complex problem that involves aspects such as modeling, control, perception or planning.
“Multi robot strategies for Intermittent Encounters” by Pablo Guallar.
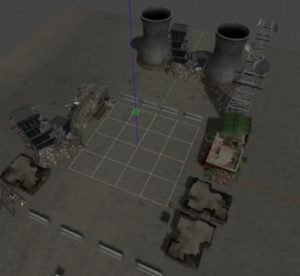 This work focuses on various aspects in the field of research in multi-robot systems, which enable the implementation of strategies in realistic simulations. This process involves a large number of small challenges to be developed, such as the calculation of trajectories and navigation, positioning of robots with respect to a given network, errors or changes during the simulation in the environment, the use of robots with differential movement, the mathematical implementation of algorithms from the scientific context, theoretical problem solving, communications between robots, etc.
This work focuses on various aspects in the field of research in multi-robot systems, which enable the implementation of strategies in realistic simulations. This process involves a large number of small challenges to be developed, such as the calculation of trajectories and navigation, positioning of robots with respect to a given network, errors or changes during the simulation in the environment, the use of robots with differential movement, the mathematical implementation of algorithms from the scientific context, theoretical problem solving, communications between robots, etc.
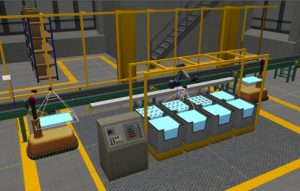 Several simulations are performed with an ABB robot model IRB 120 and serve as an explanation of how to perform motion planning in a simulation environment. They describe the different methods for moving a robotic manipulator in a scenario. Since normally in industries several robots work simultaneously in work cells, one of the methods of motion planning has been applied to a multi-robot case. Finally, two manipulation tasks are developed with Universal Robots’ collaborative robots, more specifically the model UR5. Each task is defined in a different scenario and is performed with two different tools, a robotic gripper and a vacuum tool.
Several simulations are performed with an ABB robot model IRB 120 and serve as an explanation of how to perform motion planning in a simulation environment. They describe the different methods for moving a robotic manipulator in a scenario. Since normally in industries several robots work simultaneously in work cells, one of the methods of motion planning has been applied to a multi-robot case. Finally, two manipulation tasks are developed with Universal Robots’ collaborative robots, more specifically the model UR5. Each task is defined in a different scenario and is performed with two different tools, a robotic gripper and a vacuum tool. This work has focused on the TurtleBot 3 mobile base, the OpenManipulator robotic arm and the union of both. The set of software, libraries and ROS packages associated with these robots have been used to carry out the task. First of all, the ROS working environment and some of the possibilities it offers have been studied. Then, we have explained and extended the functionalities that ROS offers for the TurtleBot 3 platforms and the OpenManipulator robotic arm, and analyzed them to work in a coordinated way.
This work has focused on the TurtleBot 3 mobile base, the OpenManipulator robotic arm and the union of both. The set of software, libraries and ROS packages associated with these robots have been used to carry out the task. First of all, the ROS working environment and some of the possibilities it offers have been studied. Then, we have explained and extended the functionalities that ROS offers for the TurtleBot 3 platforms and the OpenManipulator robotic arm, and analyzed them to work in a coordinated way.


 In this Project, the student will become familiar with the interaction between the “Robot Operating System” (ROS) and two different robots (a commercial one, Turtlebot, and another one in development, Campero). The objectives include understanding the ROS tool applied to robot navigation, developing skills for the installation of ROS software on a computer with the Ubuntu operating system, applying the software to the Turtlebot and Campero robots by performing navigation simulations and critically analyzing the results.
In this Project, the student will become familiar with the interaction between the “Robot Operating System” (ROS) and two different robots (a commercial one, Turtlebot, and another one in development, Campero). The objectives include understanding the ROS tool applied to robot navigation, developing skills for the installation of ROS software on a computer with the Ubuntu operating system, applying the software to the Turtlebot and Campero robots by performing navigation simulations and critically analyzing the results. Two robotic arms, PhantomX Pincher 4 degrees of freedom (GDL) will be used to work in a multi-robot system. After their assembly, we will develop the geometric modeling of our robot using homogeneous matrices and the Denavit-Hartenberg parameterization, which together with the inverse kinematics will allow us to plan Cartesian trajectories. A coordinated movement will be developed between both robots, in which they will be in charge of manipulating a deformable solid, specifically by rotating the sole of a shoe.
Two robotic arms, PhantomX Pincher 4 degrees of freedom (GDL) will be used to work in a multi-robot system. After their assembly, we will develop the geometric modeling of our robot using homogeneous matrices and the Denavit-Hartenberg parameterization, which together with the inverse kinematics will allow us to plan Cartesian trajectories. A coordinated movement will be developed between both robots, in which they will be in charge of manipulating a deformable solid, specifically by rotating the sole of a shoe.


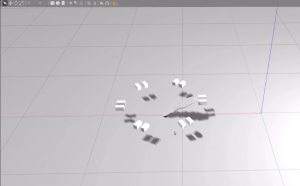
 Abstract: Perception of deformation is a key problem when dealing with autonomous manipulation of deformable objects. Particularly, this work is motivated by tasks where the manipulated object follows a prescribed known deformation with the goal of performing a desired coverage of the object’s contour along its deformation. The main contribution is a simple yet effective novel perception system in which a team of robots equipped with limited field-of-view cameras covers the object’s contour according to a prescribed visibility objective. In order to define a feasible visibility objective, we propose a new method for obtaining the maximum achievable visibility of a contour from a circumference around its centroid. Then, we define a constrained optimization problem and we solve it iteratively to compute the minimum number of cameras and their near optimal positions around the object that guarantee the visibility objective, over the entire deformation process.
Abstract: Perception of deformation is a key problem when dealing with autonomous manipulation of deformable objects. Particularly, this work is motivated by tasks where the manipulated object follows a prescribed known deformation with the goal of performing a desired coverage of the object’s contour along its deformation. The main contribution is a simple yet effective novel perception system in which a team of robots equipped with limited field-of-view cameras covers the object’s contour according to a prescribed visibility objective. In order to define a feasible visibility objective, we propose a new method for obtaining the maximum achievable visibility of a contour from a circumference around its centroid. Then, we define a constrained optimization problem and we solve it iteratively to compute the minimum number of cameras and their near optimal positions around the object that guarantee the visibility objective, over the entire deformation process.