Different students have presented their final degree projects in the framework of COMMANDIA:
“Development of a practical demonstrator in ROS for the UR10 robot manipulator” by Ignacio Herrera Seara
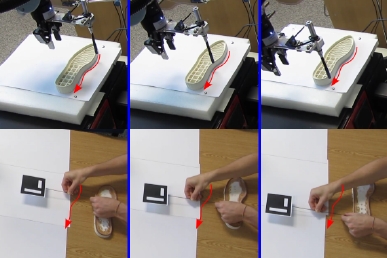
In this work, the UR10 collaborative robot has been used together with the ROS environment for the development of several practical applications, which have been tested both in simulation and in a real environment. The control of the robot movements has been developed through the MoveIt framework. The implemented applications have been the following: making drawings on a canvas by the robot, extraction and drawing of contours of real objects and, finally, teleoperation of the robot. In addition, the last two applications make use of the RGB-D Realsense D435 camera for their operation.
“Multi-camera mapping with RGB-D sensor” by Juan García-Lechuz Sierra
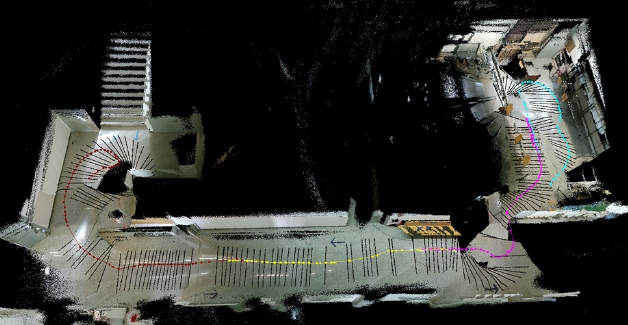
As with people, many tasks assigned to robots require the coordination of several of them to be carried out. One of them is the perception of the environment, when it has a certain complexity and its analysis is too computationally or time-consuming. For this coordination to be effective, the development of collaborative techniques that take into account the variability of the environment and result in a robust analysis of the environment and as complete as possible is required. The objective of this work is to obtain the representation in three dimensions of different environments, using a moving RGB-D sensor together with an application that allows its development in several sessions, representing the joint work between several cameras placed in different mobile robots to generate a single map. In addition, the My Find Object application is developed to censor objects and surfaces during the generation of the map, processing the images obtained by the RGB-D sensors to eliminate the information of these objects before it is introduced in the application from which the representation in three dimensions is obtained.
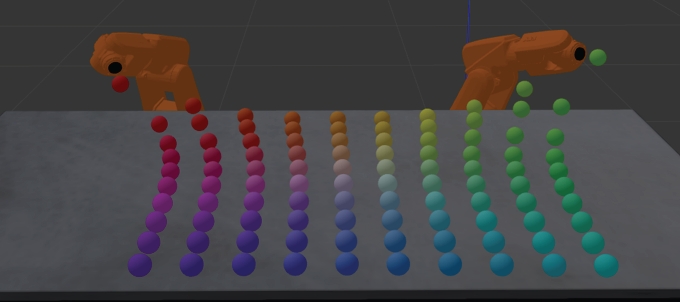
“Deformable object manipulation in multi-robot environments” by Andrés Otero García
A case is studied in which multiple IRB120 robots from ABB manipulate simultaneously a deformable object, such as a cloth. The objective is to develop a simulation in which at least two robots can perform synchronized movements to make changes in the deformable object, such as displacement or deformation, without colliding with the object during manipulation.