“Simulation of soft bodies in ROS and Gazebo” by Nicolás Iván Sanjuán Tejedor
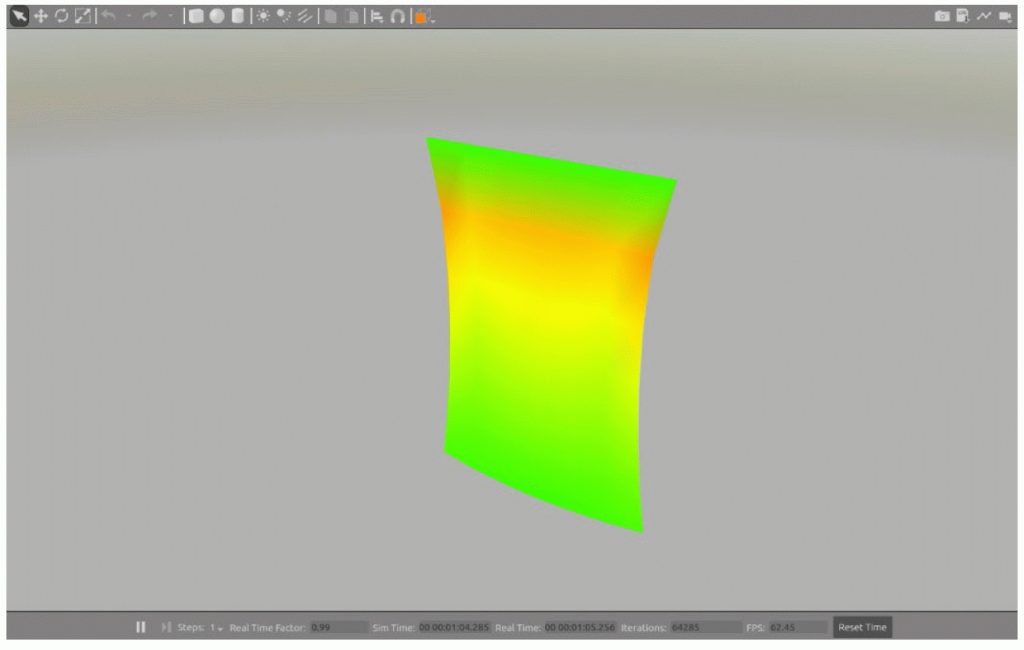
The main objective of this work was to deepen the modeling of deformable objects in the field of robotics. As a result, in this work a simulation of a cloth-like deformable object has been carried out in the 3D robotics simulator Gazebo and the ROS (Robot Operating System) working environment by developing specific plugins.