

Title: Dynamic occlusion handling for real time object perception
Authors: Ignacio Cuiral-Zueco and Gonzalo Lopez-Nicolas
Conference: International Conference on Robotics and Automation Engineering
(ICRAE 2020), November 20-22, 2020
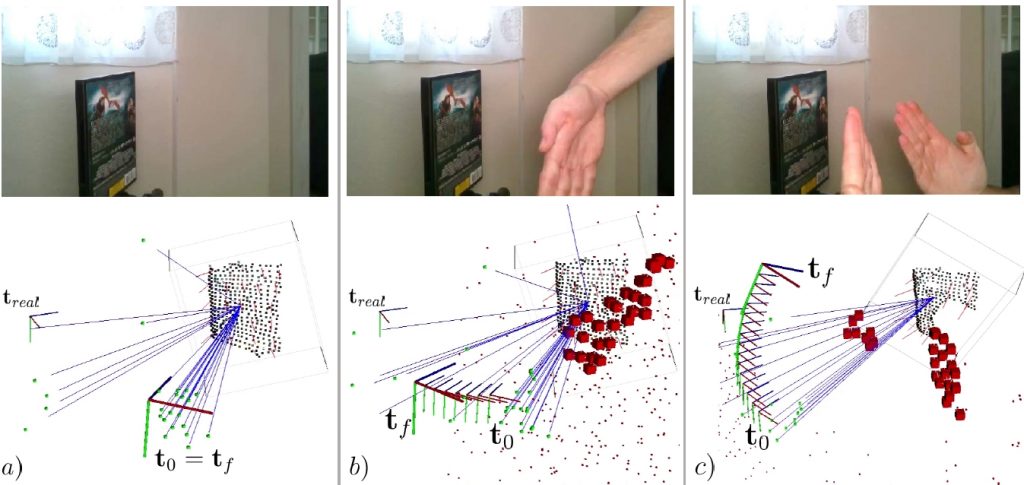
Abstract: An RGB-D based occlusion-handling camera position computation method for proper object perception has been designed and implemented. This proposal is an improved alternative to our previous optimisation-based approach where the contribution is twofold: this new method is geometric-based and it is also able to handle dynamic occlusions. This approach makes extensive use of a ray-projection model where a key aspect is that the solution space is defined within a sphere surface around the object. The method has been designed with a view to robotic applications and therefore provides robust and versatile features. Therefore, it does not require training nor prior knowledge of the scene, making it suitable for diverse applications and scenarios. Satisfactory results have been obtained with real time experiments.