

Title: RGB-D tracking and optimal perception of deformable objects
Author: Ignacio Cuiral-Zueco, Gonzalo López-Nicolás
Journal: IEEE Access, vol. 8, pp. 136884-136897, 2020.
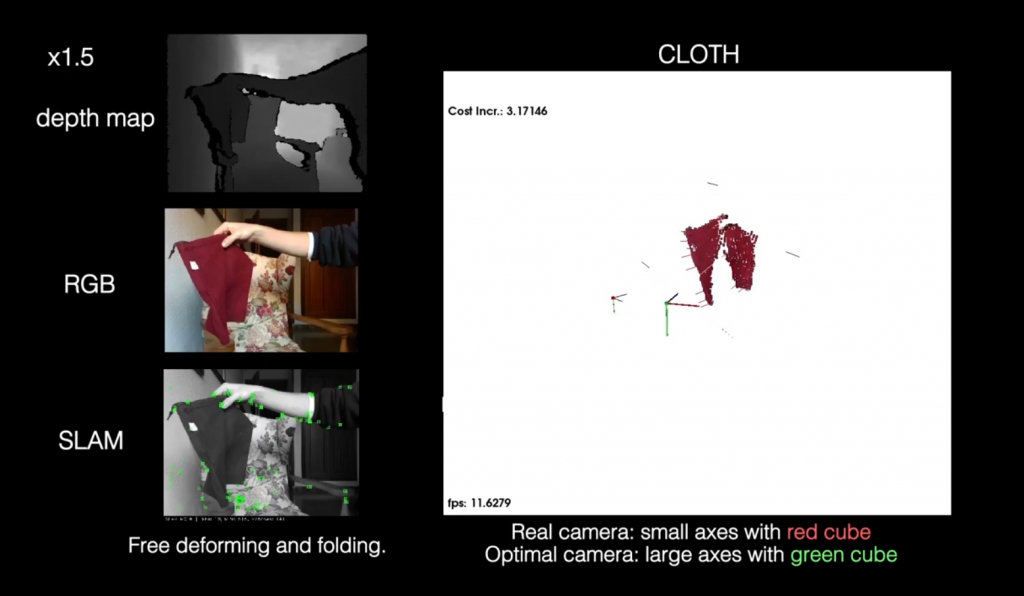
Abstract: Addressing the perception problem of texture-less objects that undergo large deformations and movements, this article presents a novel RGB-D learning-free deformable object tracker in combination with a camera position optimisation system for optimal deformable object perception. The approach is based on the discretisation of the object’s visible area through the generation of a supervoxel graph that allows weighting new supervoxel candidates between object states over time. Once a deformation state of the object is determined, supervoxels of its associated graph serve as input for the camera position optimisation problem. Satisfactory results have been obtained in real time with a variety of objects that present different deformation characteristics.
Download paper