

Different students have presented their final master projects in the framework of COMMANDIA:
“Visual SLAM systems for robotic manipulator control in non-rigid environments” by Ignacio Cuiral.
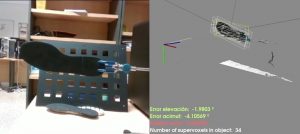 This work covers the process of investigation and study of a visual perception technique that allows the acquisition of useful information from the deformable objects in a scene to facilitate their manipulation with the use of robots.
This work covers the process of investigation and study of a visual perception technique that allows the acquisition of useful information from the deformable objects in a scene to facilitate their manipulation with the use of robots.
“Multi-camera systems for volumetric reconstruction of 3D objects” by Enrique Hernández.
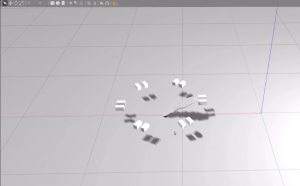 This work focuses on the study and subsequent implementation of a distributed algorithm for the perception of deformable objects, as well as the development of the appropriate software architecture for its implementation. This algorithm is within the field of cooperative control of multi-agent systems. Within this framework, the volumetric reconstruction of objects is essential in robotic manipulation. Building the 3D model of an object is a complex problem that involves aspects such as modeling, control, perception or planning.
This work focuses on the study and subsequent implementation of a distributed algorithm for the perception of deformable objects, as well as the development of the appropriate software architecture for its implementation. This algorithm is within the field of cooperative control of multi-agent systems. Within this framework, the volumetric reconstruction of objects is essential in robotic manipulation. Building the 3D model of an object is a complex problem that involves aspects such as modeling, control, perception or planning.
“Multi robot strategies for Intermittent Encounters” by Pablo Guallar.
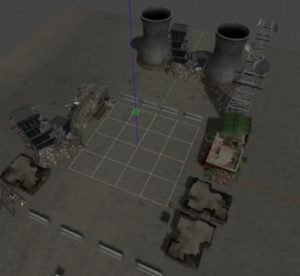 This work focuses on various aspects in the field of research in multi-robot systems, which enable the implementation of strategies in realistic simulations. This process involves a large number of small challenges to be developed, such as the calculation of trajectories and navigation, positioning of robots with respect to a given network, errors or changes during the simulation in the environment, the use of robots with differential movement, the mathematical implementation of algorithms from the scientific context, theoretical problem solving, communications between robots, etc.
This work focuses on various aspects in the field of research in multi-robot systems, which enable the implementation of strategies in realistic simulations. This process involves a large number of small challenges to be developed, such as the calculation of trajectories and navigation, positioning of robots with respect to a given network, errors or changes during the simulation in the environment, the use of robots with differential movement, the mathematical implementation of algorithms from the scientific context, theoretical problem solving, communications between robots, etc.